




")

Останні досягнення в галузі теоретичних розробок і практичного застосування мікрохвильової техніки, а також розвиток елементної бази (в тому числі мікропроцесорної техніки) дозволяють очікувати, що в самому недалекому майбутньому з'являться конструкції детекторів металевих предметів, в яких буде використаний принцип радіолокації. Інтерес до пристроїв, в яких використовується радіолокаційний принцип, пояснюється тим, що дальність дії таких металошукачів незрівнянно вище, ніж у інших типів детекторів.
В даний час в різних джерелах можна зустріти досить оригінальні схемотехнічні рішення таких металошукачів. Однак їх практична реалізація поки досить скрутна.
Основою побудови таких пристроїв є принцип, який використовується в радіолокації (рис. 1.5). Як і в радіолокаторах, інформація про наявність у зоні дії приладу якого-небудь об'єкта (дальність, розміри тощо) оцінюється після обробки параметрів імпульсного сигналу, відбитого від цього об'єкта.
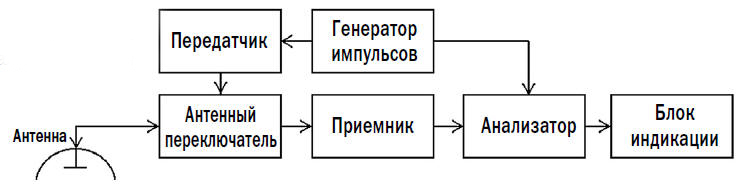
Рис. 1.5. Спрощена блок-схема радіолокаційного металошукача
Імпульсний сигнал, сформований генератором імпульсів, модулює сигнал передавача, який випромінюється антеною. По досягненні об'єкта переданий сигнал відбивається від нього. Відбитий сигнал приймається антеною, а потім через антенний перемикач і приймач подається на аналізатор. На каскади аналізатора також подається сигнал, що формується імпульсним генератором.
Обидва надійшли на аналізатор сигналу порівнюються, після чого проводиться оцінка відмінностей з подальшим формуванням даних для блоку індикації. При цьому інформація про відстань до виявленого об'єкта формується після оцінки часу затримки відображеного сигналу, а відомості про величину об'єкта - за амплітуді цього сигналу.
Автор: Адаменко М. В.