




")

У статті описані два тиристорних регулятора потужності для інерційної навантаження. Застосування мікроконтролерів дозволяє використовувати спеціальний алгоритм рівномірного розподілу імпульсів струму в навантаженні і отримати високу частоту комутації навіть при кроці регулювання потужності 1 %. Перше пристрій призначений для регулювання потужності в навантаженні, розрахованої на мережне напруга. Друге працює з низьковольтної навантаженням, яка гальванічно не пов'язана з мережею. Крім того, цей регулятор забезпечує стабілізацію потужності в навантаженні при коливаннях напруги.
Для управління інерційним навантаженням застосовують тиристорні регулятори потужності, працюють за принципом подачі на навантаження декількох напівперіодів мережевої напруги з наступною паузою. Перевага таких пристроїв полягає в тому, що моменти комутації тиристорів збігаються з моментами переходу мережевого напруги через нуль, тому рівень радіоперешкод різко знижений. Крім того, такий прилад, на відміну від регулятора з фазовим керуванням, не містить аналогових порогових елементів, що збільшує стабільність роботи і спрощує налагодження. Оскільки комутація відбувається тільки під час переходу мережевого напруги через нуль, мінімальна порція енергії, яка надходить у навантаження, дорівнює енергії, споживаної навантаженням за один напівперіод. Тому для зменшення кроку регулювання потужності доводиться подовжувати повторювану послідовність напівперіодів.
Наприклад, щоб отримати крок у 10 %, необхідна послідовність з десяти напівперіодів. На рис. 1,а показано послідовність імпульсів на керуючому електроді тиристора для потужності в навантаженні 30 %.
Як видно, тиристор відкритий в протягом перших трьох напівперіодів, а в семи наступних закритий. Далі ця послідовність повторюється. Частота комутації у такого регулятора для будь-якої потужності, меншою 100 %, дорівнює 1/10 частоти проходження напівперіодів.
Набагато логічніше було б розподілити напівперіоди, протягом яких тиристор відкрито, по можливості, рівномірно по всій послідовності [1]. Загалом разі завдання рівномірного розподілу будь-якого числа імпульсів N послідовності довжиною М (при N, що менше або дорівнює М) вирішує алгоритм Брезенхема. який зазвичай використовують в растровій графіці для побудови похилих відрізків. Цей алгоритм реалізується за допомогою цілочисельний арифметики, що істотно спрощує програмування. На рис. 1,6 показана послідовність для тієї ж потужності в 30 %. але з застосуванням алгоритму Брезенхема. В останньому випадку частота комутації в три рази вище. Слід відзначити, що виграш більш помітний при малому кроці регулювання потужності.
Основа регулятора потужності (рис. 2) - мікроконтролер DD1 АТ89С2051 фірми ATMEL [2]. Для живлення використаний малопотужний трансформатор ТТ. що разом з застосуванням оптотиристоров забезпечує гальванічну розв'язку від мережі. Це робить пристрій більш электробезопасным. Ще одна корисна властивість регулятора - його можна використовувати з навантаженнями, розрахованими на різний робочий напруга. Для цього достатньо подати на тиристори необхідну напругу з додаткового трансформатора. Можна, наприклад, живити низьковольтний паяльник. Необхідно тільки, щоб напруга і струм не перевищували максимально допустимі значень у застосованих тиристорів.
Регулюють потужність в навантаженні кнопками SB1 і SB2. Коротке натискання на одну з кнопок збільшить або зменшить на один крок, а при утриманні кнопки відбувається монотонне зміна потужності. Одночасне натискання двох кнопок призводить до вимкнення навантаження, якщо до цього вона була включена або включає максимальну потужність, якщо навантаження була вимкнена.
Значення потужності в навантаженні виводять на світлодіодні індикатори семиэлементные HG1-HG3. Для зменшення числа елементів застосована динамічна індикація, реалізована програмно. Катоди індикаторів підключені до портів мікроконтролера, аноди включають транзистори VT3 і VT4. якими управляють сигнали сканування індикаторів. В старшому розряді можливо индицирование лише одиниці, тому елементи В і С підключені через резистори до одного порту, а аноди індикаторів HG1 і HG2 об'єднані. Імпульсний струм елементів обмежений резисторами R10-R18 на рівні приблизно 15мА, що менше максимально допустимого струму для портів (20 мА). але достатньо для одержання необхідної яскравості.
Вбудований у мікроконтролер аналоговий компаратор здійснює прив'язку до моменти переходу мережевої напруги через нуль. На його входи через обмежувачі VD5R2 і VD6R3 поступає змінна напруга з вторинної обмотки трансформатора живлення. Роль обмежувача для негативного напівперіоду мережевої напруги виконують діоди випрямного моста. Перемикання компаратора відбувається в моменти переходу мережевої напруги через нуль. Вихід компаратора опитується програмно, і як тільки буде виявлено зміну його стану, на виході керування тиристорами (порт мікроконтролера Р3.2) з'являється управляючий сигнал на включення. У випадку, коли поточний напівперіод підлягає пропуску, цього сигналу не буде. Потім на 4 мс включається індикатор HG3. У цей час відбувається перевірка замкнутого стану кнопок в. якщо потрібно, змінюється значення поточної потужності. Після цього знімають керуюча напруга з тиристорів і на 4 мс включають індикатори HG1 і HG2. Далі протягом 4 мс очікується нове зміна стану компаратора.
Сигнал з порту Р3.2 надходить на комутатор, виконаний на транзисторах VT1 і VT2, який служить для управління випромінюючими діодами оптотиристоров. Для комутації навантаження використовуються два оптотиристора, включені зустрічно-паралельно. Їх випромінюючі діоди з'єднані послідовно. Струм випромінюючих діодів -приблизно 100 мА - задає резистор R1.
Регулятор може працювати в двох режимах з різним кроком регулювання потужності. Режим роботи вибирають запаиваемой перемичкою S1. Її положення мікроконтролер опитує відразу після скидання. В положенні 1, показаному на схемі, крок регулювання потужності - 1 %. При цьому на індикаторі відображаються числа від 0 (0 %) до 100 (100 %). В положенні 2 крок дорівнює 10 %. На індикатор виводяться числа від 0 (0 %) до 10 (100 %). Вибір десяти градацій в режимі 2 обумовлений тим. що в деяких випадках (наприклад, управління електроплитою малий крок регулювання потужності не потрібен. Якщо регулятор припускають використовувати тільки в такому режимі, індикатор HG1 і резистори R17, R18 можна не встановлювати. Взагалі кажучи, пристрій дозволяє довільно задати число градацій потужності для кожного режиму. Необхідно лише в код програми за адресою 0005Н занести бажане значення градацій для режиму 1. а за адресою 000ВН - для режиму 2. Потрібно лише пам'ятати, що максимальне число градацій в режимі 1 повинно бути не більше 127, а в режимі 2 - не більше 99, оскільки в цьому режимі індикація сотень неможлива.
Якщо струм навантаження не перевищує 2 А. оптотиристоры можна використовувати без тепловідводів. При більшому струмі їх встановлюють на радіатори площею 50…80 см'. Коли навантаження живлять напругою менше 50 Ст. оптотиристоры можуть бути будь-якого класу (по напрузі). При роботі з мережевою напругою клас оптотиристоров повинен бути не нижче 6. Трансформатор харчування - будь-який малопотужний з напругою на вторинній обмотці 8… 10 В і допустимим струмом не менше 200 мА. Діоди FR157 (VD1-VD4) замінні на КД208 КД209 або випрямний міст КЦ405 з будь-яким буквеним індексом. Мікросхема стабілізатора DA1 7805 (вітчизняний аналог КР142ЕН5А, КР1180ЕН5) додаткового тепловідводу не вимагає. Транзистори VT2-VT4 - будь-які малопотужні структури p-n-р. Замість VT1 застосовуються транзистори КТ815, КТ817 з будь-яким буквеним індексом. Однак при цьому необхідно підібрати резистор R5. Діоди VD5. VD6 - будь-які малопотужні кремнієві, наприклад, КД521, КД522. Кнопки SB1 і SB2 - будь-які малогабаритні без фіксації, наприклад, ПКн-159. Індикатори HG1 - HG3 -будь-які семиэлементные з загальним анодом, необхідної яскравості світіння. Конденсатори С1. C3, C6 - будь-які оксидні, решта - керамічні. Резистор R1 - МЛТ-0,5, решта -МЛТ-0.125. Ще зручніше застосувати резистори для поверхневого монтажу, наприклад. РН1-12.
Регулятор в налагодженні не потребує, якщо зібраний з завідомо справних деталей, а мікроконтролер запрограмований без помилок. Бажано все ж таки перевірити правильність прив'язки до частоті мережного напруги. Для цього слід засинхронізувати осцилограф мережевим напругою і переконатися, що імпульси сканування дисплея (сигнали RXD і ТХО мікроконтролера) синхронні з мережею мають подвоєну мережеву частоту. Буває, що при підключенні навантаження за перешкод порушується синхронність. У цьому випадку необхідно між входами компаратора (висновки 12, 13 мікроконтролера) включити конденсатор ємністю 1000-4700 пф.
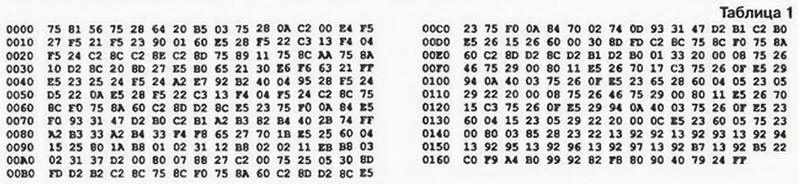
Коди програми мікроконтролера наведено в табл. 1.
При кроці регулювання 1 % нестабільність напруги мережі є основним джерелом похибки установки потужності. Якщо навантаження гальванічно не пов'язана з мережею, нескладно виміряти середнє значення прикладеної до навантаження напруги і з допомогою ланцюга зворотного зв'язку підтримувати його постійним. Цей принцип реалізований у другому регуляторі. Функціональна схема пристрою наведена на рис. 3.
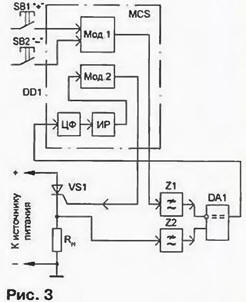
Для роботи в режимі автоматичного регулювання використовують два Брезенхемовских модулятора (Мод. 1 і Мод. 2), які реалізовані програмно. На вхід першого надходить код необхідної потужності, що задають кнопками управління. На його виході формується імпульсна послідовність, яку через фільтр нижніх частот (Z1) подають на інвертуючий вхід компаратора. На його неінвертуючий вхід після фільтра нижніх частот (Z2) поступає напруга, що знімається з навантаження. З виходу компаратора однобитный сигнал помилки подають на вхід мікроконтролера, де його піддають цифровий фільтрації.
Оскільки цифровий фільтр (ЦФ) працює синхронно з модуляторами, забезпечується ефективне придушення пульсацій на частоті повторення вихідних імпульсних послідовностей і її гармоніках. З виходу цифрового фільтра восьмибітний сигнал помилки надходить на інтегруючий регулятор (ІР). Для підвищення точності інтегруючий регулятор працює в шестнадцатиразрядной сітці. Молодші вісім біт вихідного коду регулятора надходять на вхід модулятора Мод. 2, на виході якого формується імпульсна послідовність, яка надходить на управління тиристорами.
Такий регулятор схемотехнически дуже схожий на описаний вище, тому має сенс зупинитися тільки на його відмінності. На рис. 4 показана відрізняється частина схеми. Інші виводи мікроконтролера DD1 на схемі не показані. Вони підключені так само. як на рис. 2.
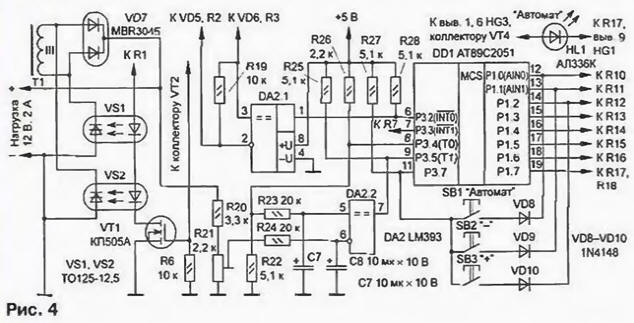
Оскільки наявних портів вводу-виводу мікроконтролера виявилося недостатньо, довелося відмовитися від використання вбудованого компаратора. Замість нього в регуляторі застосований здвоєний компаратор DA2. На одному (DA2.1) зібраний вузол прив'язки до моментів переходу через нуль напруги. Із-за особливостей мікросхеми LM393 в цей вузол довелося додати резистор R19, який з резисторами R2 і R3 (див. рис. 2) утворює дільник напруги, що зменшує напруга негативної полярності на входах компаратора. Сигнал (меандр мережевий частоти) з виходу компаратора поступає на вхід мікроконтролера Р3.2.
Другий компаратор (DA2.2) застосовується в ланцюзі зворотного зв'язку. Однобитный сигнал помилки надходить на вхід мікроконтролера Р3.5. На входах компаратора встановлені ФНЧ. утворені елементами R23, С7 і R24, С8. Сигнал з виходу модулятора (висновок порту Р3.4 мікроконтролера) надходить на вхід через ФНЧ дільник R22R26. який необхідний з тієї причини, що компаратор не може працювати з вхідною напругою, близькою до напруги живлення. Амплітуда імпульсів після дільника - близько 3,5 Ст. Стабільність амплітуди визначається стабільністю напруги живлення +5 В, яке використане як зразкову.
Напруга, що знімається з навантаження, що надходить на вхід іншого ФНЧ також через дільник R20R21. Його вибирають так. щоб при номінальному напрузі мережі і потужності в навантаженні 100 % напруга на виході ФНЧ становило 3,5 Ст. Сигнал з виходу мікроконтролера РЗ.З подають на транзисторний комутатор, керуючий оптотиристорами. Мережевий трансформатор має додаткову обмотку (111), до якої підключений керований випрямляч, утворений оптотиристорами VS1. VS2 і діодним складанням VD7. від якого і живлять навантаження.
Кнопки управління для економії портів мікроконтролера підключені інакше, ніж у попередньому пристрої. В циклі роботи регулятора є проміжок, коли індикатори вимкнені. В цей час виявилося можливим провести сканування кнопок по лініях управління індикаторами. Таким чином, три кнопки використовують додатково тільки одну лінію: це - лінія повернення, підключена до висновку порту Р3.7. Третя кнопка знадобилася для режиму "Автомат". Відразу після включення пристрій знаходиться в режимі ручного управління, тобто функціонально відповідає регулятору, описаному вище. Для автоматичного включення регулювання потрібно одночасно натиснути на кнопки "Автомат" і "+". При цьому запалюється світлодіод HL1 "Автомат". В такому режимі регулятор автоматично підтримує встановлену потужність. Якщо тепер натиснути і утримувати кнопку "Автомат", то на індикаторах можна подивитися поточний стан регулятора. Коли мережеве напруга зменшилася настільки, що підтримувати потужність немає можливості, світлодіод "Автомат" починає мигати. Вимкнути режим автоматичного регулювання можна одночасним натисканням на кнопки "Автомат" і "- ".
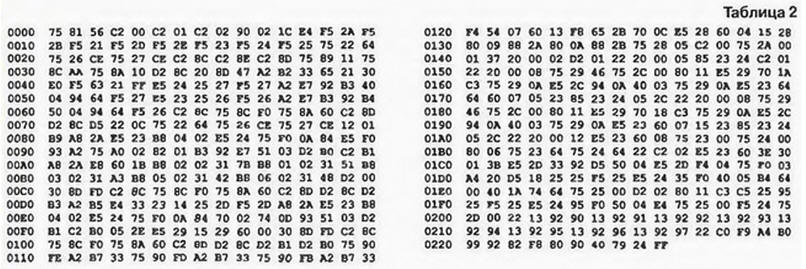
Коди прошивки програми мікроконтролера цього регулятора наведено в табл. 2.
При струмі навантаження понад 2 А оптотиристоры слід встановити на тепловідвід. Тепловідвідні пластина корпусу оптотиристора з'єднана з анодом, тому в пристрої прилади можна монтувати на один теллоотвод. На місці VD7 бажано застосувати збірку діодів Шотткі (або два окремих діода Шотткі. наприклад. КД2998А). В крайньому випадку можна використовувати звичайні діоди, розраховані на необхідний струм навантаження. Хороші результати можна отримати з діодами серій КД2997. КД2999. КД213. Компаратор LM393 випускає З "Інтеграл" під позначенням IL393. Можна застосувати й два окремих компаратора, наприклад, LM311. Замість транзистора КП505А допустимо застосувати біполярний транзистор серій КТ815, КТ817, включивши в ланцюг колектора транзистора VT2 резистор опором 1 кОм. До іншим деталям вимоги ті ж. що і для регулятора, описаного вище.
При налагодженні регулятора до нього підключають навантаження і подають номінальна мережеве напруга (наприклад, з допомогою Латр). Потім, встановлюючи максимальну потужність (100 %). Підлаштування резистором R21 домагаються, щоб різниця напруг на входах компаратора 0А2.2 була близька до нуля. Після цього зменшують потужність до 90 % і включають режим "Автомат". Підстроюванням резистора R21 домагаються збігу (з точністю ± 1) встановленої потужності і свідчень індикаторів в режимі контролю стану регулятора (при натиснутій кнопці "Автомат").
Література
Автор: Л. Ридико, р. Мінськ, Білорусія