




")

Poruszając się do tyłu, kierowca samochodu nie może zobaczyć pewną strefę ruchu w przestrzeni. Ta strefa ma długość dwóch metrów, a w niej mogą okazać się ludzie lub zwierzęta, a także przedmioty, stanowiące przeszkodę dla ruchu. Osiągnięcia nowoczesnej techniki pozwalają tworzyć specjalne urządzenia do przeglądu określonego miejsca i informowania kierowcy w przypadku, gdy na drodze samochodu znajdują się jakieś obiekty. Najbardziej optymalnie jest taki problem został rozwiązany z pomocą impulsowego akustycznej lokalizacji. Znane są udane próby budowy takich urządzeń (patrz, na przykład, książkę Sieja X., Мидзутани S. "Wprowadzenie do elektronikę samochodową". - M.: Świat, 1989). Jednak ze względu na złożoność i wysokie koszty te lokalizatory nie otrzymaliśmy jeszcze szerokiego zastosowania.
Akustyczny lokalizator, proponowany czytelnikom, wykonana na bazie mikrokontrolera Z8. To jest proste, łatwe do powtórzenia amatorów powtórzeń. Przy odpowiednim dopracowaniu programu i konstrukcji można go używać jako niezbędnego pomocnika dla niewidomych, urządzeń ochrony pomieszczeń, przenośnego echosondy wędkarza-amatora, bezdotykowego wskaźnika poziomu cieczy itp.
Pojęcie lokalizatora jest przedstawiona na rys. 1. Jego podstawą mikrokontrolera (MK) Z86E0208PSC (DD1).
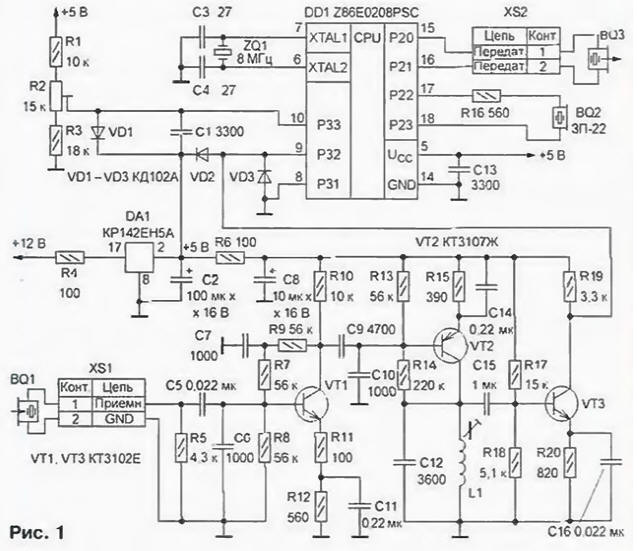
Gwint времязадающая łańcuch MK składa się z rezonatora kwarcowego ZQ1 na częstotliwości 8 Mhz i kondensatorów C3. C4. Ultradźwiękowy nadajnik BQ3 jest podłączony bezpośrednio do wyprowadzeń portu P2 MK. Rozpiętość pobudzenie napięcia na wejściu przetwornika wynosi 10 V. czas trwania paczki impulsów - 1 ms. Sygnał powrotny, przyjęty ultradźwiękowy odbiornikiem BQ1, wchodzi na wejście трехкаскадного rezonansowego wzmacniacza wykonanego na tft VT1-VT3. Z jego wyjścia sygnał z składowej stałej 2.5 W serwowane na неинвсртирующий wejście (R32) wbudowany komparator MK. Na odwracanie wejście komparatora (РЗЗ) pochodzi wzorowe napięcie 2.7 v z dzielnika R1R3. co umożliwia zaznaczenie przydatne odbitego sygnału na poziomie przyjętych zakłóceń. Łańcuch wzorowego napięcia dodatkowo jest zabezpieczona przed zakłóceniami restrykcyjne diodą VD1 i kondensatorem C1. Diody VD2 i VD3 ograniczają wartość chwilowa odbitego sygnału poziomach 0 i 5 V. sygnał Dźwiękowy ostrzegający kierowcę o obecności przeszkody w niewidocznej strefie, powstaje пьезоизлучателем BQ2. podłączony przez rezystor R16 bezpośrednio do wyprowadzeń portu P2 MK.
Jest zasilany lokalizator napięciem 12 ± 2.5 W celu kierunkowskazów i świateł cofania samochodu. Układ DA1 stabilizuje napięcie na poziomie 5 W, niezbędnym do normalnego funkcjonowania MK. W obwodzie zasilania urządzenia jest zainstalowany filtr złożony z kondensatorów C2, C8, Z13 i rezystora R6.
Zasada działania lokalizatora opiera się na promieniowaniu paczki impulsów o częstotliwości ultradźwiękowej i przy odbiorze odbitego przeszkodą sygnału. Czas od momentu emisji do momentu odbioru odbitego sygnału wprost proporcjonalnie do odległości od obiektu. W zależności od odległości lokalizator tworzy jeden z dwóch symboli ostrzegawczych sygnałów dźwiękowych: jeśli jest mniej niż 1 m, generowane częste tonalne przesyłki, jeśli od 1 do 2 m - rzadkie. Przy odległości większej niż 2 m, sygnał dźwiękowy brakuje. Czas oczekiwania odbitego sygnału - 60 ms, po czym promieniuje następna paczka impulsów i proces się powtarza.
Bardziej szczegółowo pracę urządzenia wyjaśnia hrabia [1], jak pokazano na rysunku. 2 obejmuje On cztery wierzchołki - stan: SEND (WYSYŁANIE) - kształtowanie ultradźwiękowy paczki impulsów; PRESS (REDUKCJA) - redukcja послезвучания emitera; WAIT (CZEKAJ) - czekam odbitego sygnału i COUNT (OBLICZENIA) - obliczenie odległości do obiektu.
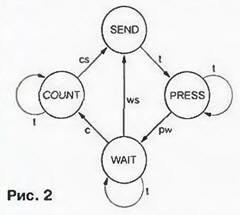
Przejścia pomiędzy stanami, pokazane łuki grafu, są powodowane przez następujące proste (oznaczone jedną literą) i pośrednie (dwoma literami zgodnie z przejściem) wydarzenia: t (timer - stoper) - alarm timera MK, z (comparator - komparator) - zadziałanie komparator MK, ws (wait - send) - zakończenie czuwania odbitego sygnału, cs (count - send) - zakończenie obliczenia odległości do obiektu i pw (press - wait) - zakończenie odliczania czasu tłumienia.
Po włączeniu zasilania następuje automatyczny reset urządzenia i inicjuje stan SEND. Główną funkcją tego stanu - rozdzielczość kształtowania ultradźwiękowy paczki impulsów o czasie trwania 1 ms. Срабатывая, zegar MK przełącza urządzenie w stan PRESS, w którym ono nie reaguje na odebrany sygnał powrotny. Czas przebywania w tym stanie, zależy od liczby alarmów zegar, który można zmieniać w zależności od typu użytego przetwornika ultradźwiękowego. Po zakończeniu odliczania czasu redukcji kolejne zadziałanie wyłącznika przełącza urządzenie w stan WAIT.
W stanie WAIT lokalizator oczekuje dobrego odbitego sygnału, który powoduje zadziałanie komparator MK. zapamiętywanie czasu od paczki do odbioru sygnału użytkowego i przejście w stan COUNT. Proces odliczania czasu w stanie WAIT synchronizuje interwencję timera MK każdą milisekundę. Jeśli przez 60 ms w tym stanie komparator MK nie zadziała, urządzenie ponownie przejdzie w stan SEND. W przypadku zadziałania komparatora przechodzi w stan COUNT.
W stanie COUNT lokator nadal досчитывать przedział czasowy 60 ms. Następnie na podstawie wcześniej popełnionych czasu od momentu przesyłki do momentu odbioru sygnału oblicza się odległość do obiektu. Zgodnie z wynikiem obliczeń urządzenie steruje wydaniem sygnału dźwiękowego z odpowiednim odstępie sygnał-przerwa". Po zakończeniu obliczeń, przechodzi w stan SEND. Dalej cykl pracy powtarza się W локаторе można wykorzystać wszystkie małe ceramiczne i niklowe kondensatory. Cewka L1 nawinięta na односекционном znormalizowanym karkasie o średnicy 8 i długości sekcji nawijania 7 mm. Подстроечник - ferrytowe (100НН) o średnicy 2,8 m i długości 12 mm. Cewka zawiera 860 zwojów nawiniętych zwój na zwoju drutu PEL 0,15 (indukcyjność 4.4 мГн). Rezystor R2 - СП5-2 lub inny mały подстроечиый wieloobrotowego. Piezoceramiczne emiter dźwięku BQ2 - SN-22 lub podobny. Tranzystory VT1. VT3 - wszystkie z serii КТ3102. VT2 - każdy z serii КТ3107.
Ultradźwiękowe emiter BQ3 i odbiornik BQ1 identyczne. W autorskim wydaniu wykorzystane przetworniki ultradźwiękowe od wyprodukowanego przemysłem nadzoru urządzenia "Echo-2", możliwe jest zastosowanie dowolnych piezoceramic przetworników, w tym domowej roboty, z takimi samymi częstotliwościami roboczymi w zakresie 36…38 khz [2]. Do ich połączenia zastosowano importowane разьемы DJK (na płytce ustalają ich gniazda DJK-2MR, a przewody dostarczają widelce DJK-2F).
Kody "firmware" ROM MK przedstawiono w tabeli. Objętość kodu - 242 bajty.

(kliknij, aby powiększyć)
Konstrukcyjnie lokalizator składa się z elektronicznej jednostki i takich samych konstrukcji emitera i odbiornika Części elektronicznej jednostki zamontowane na płytce drukowanej z фольгированного стеклотекстолита zgodnie z rys. 3.
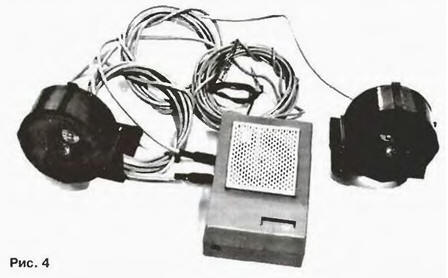
Opłata jest umieszczona w plastikowej obudowie od радиоконструктора "Urządzenie zestawu głośno mówiącego" produkcji firmy "Nowogrodzie fabryka maszyn". Wygląd lokalizatora w zbieraniu pokazano na rysunku. 4.
W celu zmniejszenia oddziaływania akustycznego przetwornika na odbiornik ultradźwiękowy ich akustyczne drogi wykonane w postaci tub. Shoutbox, ponadto koordynuje stosunkowo wysoka pełne impedancja konwerter z dość niskiej impedancji obciążenia, tj. powietrza (3). Najbardziej skuteczne gwałtowny wiadomość, powierzchnia przekroju poprzecznego którego zmienia się zgodnie z prawem, S = S0em , gdzie S - powierzchnia przekroju poprzecznego gremium w odległości x od konwerter, S0 - powierzchnia wlotu tuby (x = 0), czyli powierzchnia konwerter, m - współczynnik rozszerzalności gremium, który zależy od częstotliwości roboczej (do 35 khz t = 0,17 mm-1).
W warunkach domowych najłatwiej zrobić shoutbox, przekrój poprzeczny ma kształt koła. Wiedząc, że pole koła jest równa πD2/4, liczą średnica tuby w powyższej formule znajdują się w różnej odległości x od konwerter (x można ograniczyć wielkości 15 do 20 mm). Następnie w получившимся wartości narysować na papierze profile podłużne tuby i na niego wykonane szablon z tektury lub blachy. Same tuby wykonują z pomocą tego szablonu z twardego styropianu. Powierzchni gotowych tub pokryte farbą w celu nadania im najlepszych właściwości akustycznych. Dla ochrony przed czynnikami atmosferycznymi tuby umieszcza się w osłony, wyposażone w uchwyty do montażu na tylnym zderzaku pojazdu. Jako podszybia wygodne w użyciu plastikowe кроссировочные skrzyni od instalacji elektrycznej. Wsporniki wykonane są z blachy stalowej. Szczeliny między pokrywą i ustnik zalać żywicą epoksydową, a całą konstrukcję pokrywa kilka warstw атмосферостойкой syntetyczną emalią.
Nawiązanie urządzenia zaczynają od sprawdzenia montażu na niezawodność połączeń i brak zwarć. Do zabudowy MK wskazane jest, aby sprawdzić działanie stabilizatora napięcia i wzmacniacza sygnału ultradźwiękowego. Do tego podłącza się zasilanie i zmierzyć napięcie na pin 5 pasku MK. Musi ono znajdować się w odległości 5 ± 0.3 V. Następnie zmierzyć napięcie stałe na wyjściu 9 panelu MK (2.5 V ± 10%) i. podłączając woltomierz do jej wniosku 10. ustalane подстроечным rezystorem R2 napięcie na 0.2…0.3 W większe od pierwszego. Dalej, podłączając wejście oscyloskopu do wniosku 9 panelu MK i składając na wejście wzmacniacza sygnał sinusoidalny o częstotliwości 37 khz i amplitudzie 3 mv, obserwują na ekranie oscyloskopu sygnał z amplitudą 4.5 V. Nastrajaniem indukcyjności cewki L1 dążą do maksymalnego wzmocnienia na określonej częstotliwości.
Wtedy przy wyłączonym zasilaniu ustalane w panel wstępnie zaprogramowany MK i połączyć urządzenie z nadajnikiem i odbiornikiem. Jeśli po włączeniu zasilania urządzenie nie działa, podłączony wejście oscyloskopu (impedancja wejściowa nie mniejsza niż 10 Mω) do wniosku XTAL2 (wyprowadzenie 6) układu DD1 i sprawdzają, podekscytowany, czy zegar taktujący MK. Brak drgań czystej sinusoidy o częstotliwości 8 Mhz świadczy o tym, że generator nie самовозбуждается. W tym przypadku trzeba sprawdzić rezonator kwarcowy ZQ1 i kondensatory C3 i C4.
W przypadku instalacji w samochodzie lokalizator размешают wewnątrz kabiny, a przetworniki ultradźwiękowe - na tylnym zderzaku, w odległości co najmniej 0,6 m jeden od drugiego. Odległość ta zapewnia szerokość strefy pracy lokalizatora równą 2 m. Zmieniając go. można regulować szerokość tej strefy.
Literatura
Autor: M. Гладштейн, M. Kul