




")

Навіть самі боязкі спроби перекласти на електронну техніку якісь функції, які людина звикла вважати "своїми", а себе, відповідно, незамінним, викликають до себе насторожене відношення. Не в останню чергу це відноситься до любительського рибальства - одному з найбільш консервативних за своїми формами захоплень людини.
Хоча важко уявити собі більш цікаве заняття для радіоаматора-конструктора. Починаючи від самої постановки виникають тут завдань, від "алгоритмізації інтуїції", до випробування придуманого. І не у віртуальному просторі, куди нас останнім часом так настійно звуть, а в самому що ні на є справжній: під блакитним небом, серед лісів і лугів, з плескотом води і рибою без штрих-коду.
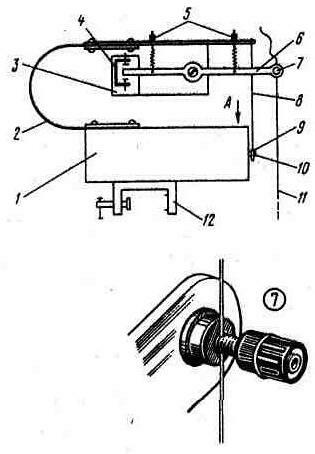
Рис. 1. Кінематична схема вудки-автомата
Кінематична схема пристрою, призначеного для автоматичної підсікання риби в складних умовах лову, показана на рис.1. Тут: 1 - корпус, в якому розміщена вся електронно-механічне "начинка" автомата; 2 - плоска пружина, головний рушій автомата; б - підпружинений коромисло з затиском 7 ліски 11, утворює зі скобою 4, укріпленої на ізолюючої пластини 3, контактну пару; 8 - тяга з сережкою зачепа 9; 10 - вал редуктора з різьбленням МЗ на кінці; 12 - струбцина кріплення автомата на борту або кормовому транці човни.
У зведеному стані автомат утримується зв'язкою вала 10 редуктора з сережкою 9. Включений двигун здатний миттєво, за кілька оборотів ротора, роз'єднати цю зчеплення. А ось в який момент це станеться - вирішить електроніка автомата.
Алгоритм його роботи простий. Перший електричний сигнал датчика, що виникає в момент торкання коромислом 6 скоби 4, переводить автомат в активний стан: починається відлік часу і рахунок цих поки ще неясних за походженням торкань. Якщо їх загальна кількість - і перешкод, і покльовок - в цьому активному стані автомата (його тривалість задається) не досягає деякого числа N (також задається), то автомат знову приймає вихідне стан - стан очікування. Якщо ж це число досягнуте, то включається електромотор і - підсічка.
Цей алгоритм реалізується електронної "начинкою" автомата, принципова схема якої наведена на рис. 2.
Тут: SF1 - контактна пара "коромисло-скоба" - датчик системи; SF2 - контактна пара "вал редуктора-сережка" (редуктор і електродвигун ставляться на підставу-ізолятор); SA1 - тумблер, контакти SA1.2 якого, размыкаясь, знеструмлюють силову частину автомата при його налаштуванні, зміні наживки і т. п.; SA2 - перемикач, яким задають число "поклевок" - N О{l,2,3,4}; SA3 - перемикач тривалості інтервалів активного часу (в секундах) - Т О{2, 4, 8}.
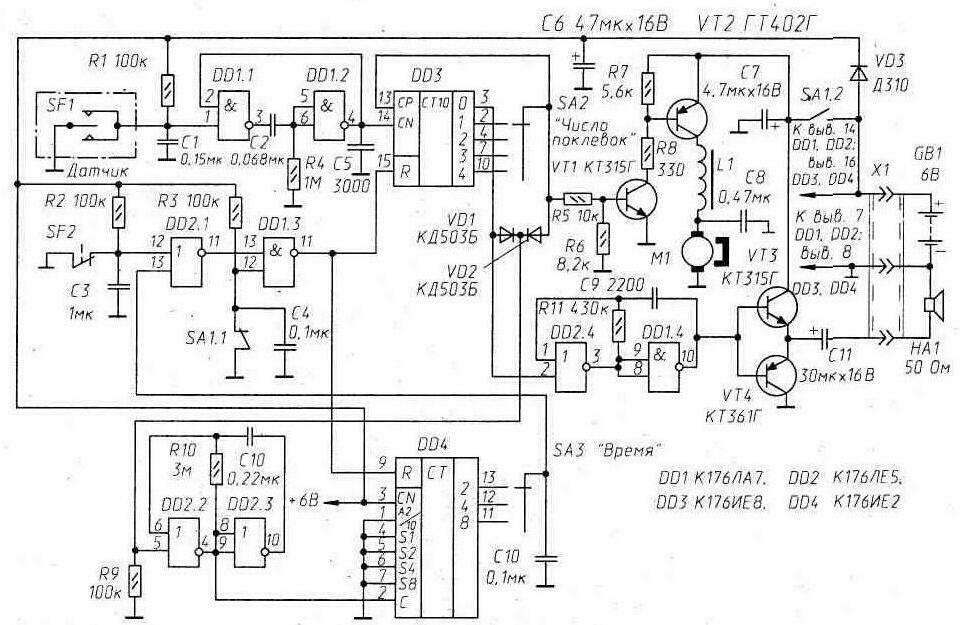
Рис. 2. Принципова схема автомата
Елементи DD1.1, DD1.2, С2, R4 складають одновібратор, що усуває помилковий рахунок в DD3 - лічильнику "поклевок" - від брязкоту контактів датчика SF1. На елементах DD2.2, DD2.3 зібраний генератор тактових імпульсів, наступних з частотою 1 Гц. Лічильником DD4, підсумовує ці імпульси, задається час активного стану автомата. Скидання лічильників, повернення автомата в початковий стан - стан очікування - здійснюється імпульсами "одиничною" амплітуди, сформованими елементами DD2.1 і DD1.3. Це відбувається або після закінчення активного часу (при появі напруги високого рівня на движку перемикача SA3), або на початку підсічки (при розриві контактів SF2), або при ручному вимкнення автомата тумблером SA1 - замиканні контактною пари SA1.1.
На елементах DD2.4, DD1.4 і транзисторах VT3, VT4 зібраний керований (по входу 2 елемента DD2.4) тональний генератор, який, порушуючи динамічну головку НА1, сигналізує рибалці про перехід автомата в активний стан.
Транзистори VT1 і VT2 - електронний ключ керування електродвигуном M1. Дросель L1 в LC-фільтрі намотують на кільцевому магнітопроводі (зовнішній діаметр - 10…12 мм) з фериту з m=1000…2000. Його обмотка містить 50…100 витків дроту ПЕВ-2 0.2…0.3.
Плоску пружину силову (2 на рис.1) - основний рушій автомата - виготовляють з смуги фосфористої бронзи товщиною 0,8 мм, Її ширина - 78 і довжина (без забитих кінців) - 220 мм. Створюється пружиною початкове зусилля при підсіканні - 1,3 кг, "мах" - до 750 мм.
Вузол 7 - звичайна клема з отвором для пропуску волосіні.
Розміри контактної скоби не критичні, важливо лише, щоб між контактними майданчиками і кінцем переміщається між ними коромисла можна було виставити потрібні зазори: мінімум - 1, максимум - 10 мм. Положення коромисла по відношенню до контактів скоби можна змінювати натягом або ослабленням пружин у вузлах 5. Загальна механічна міцність всіх цих елементів повинна бути достатньо високою, так як вони "тримають" рибу. У всякому разі 10…15-кілограмові ривки і удари вони зобов'язані переносити без наслідків. Гвинт-вісь, на якому гойдається коромисло, повинен надавати йому мінімальний опір.
Спусковий пристрій автомата і розміщення його деталей в корпусі, склеенном з досить товстого (8… 10 .мм) листового органічного скла або удароміцного полістиролу у вигляді коробки з накладною кришкою, показано на рис. 3, а. Електродвигун 1 - будь-який малогабаритний малопотужний, наприклад, від электрофицированной игрущки, що має на осі малу шестерню 7 діаметром 5…6 і довжиною не менше 5 мм (по ній, вывинчиваясь з сережки, повинна вільно переміщатися велика шестерня 4).
До установки електродвигуна необхідно перевірити якість ізоляції його роторної обмотки - опір витоку повинно бути не менше 1 МОм.
Відповідна велика шестерня редуктора, що забезпечує чотирьох-п'ятикратне уповільнення, може знайтися в тій ж іграшці.
Інші деталі спускового пристрої: 6 - вал редуктора (сталь); 2-його внутрішня опора (вона кріпиться на "дні" корпусу); 3 - м'яка плоска пружина на валу, виштовхуюча його назовні; 5 - бронзове або латунне підшипник, запресованих в стінку корпуса.
Сережку сцепа валу редуктора з тягою пружини можна виконати за варіантом, показаному на рис. 3, б. У цьому у разі кришці корпусу повинно бути зроблено отвір діаметром близько 25 мм (його місце на рис.1 зазначено стрілкою А), через яке, обертаючи велику шестерню редуктора пальцем, угвинчують кінець його вала в сережку. Це зчіпка дуже високою надійності, вона не схильна практично ніяким стороннім впливам. За іншим варіантом (рис. 3, в) сережку, різьба в якій збережена лише в нижній частині її еліптичного отвори, просто накидають на який виступає з корпусу кінець вала редуктора.
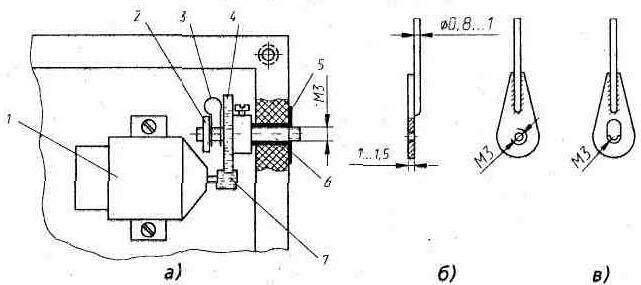
Рис. 3. Елементи конструкції
Підсічка починається з появи "1" - напруги, близької до напруги харчування - на движку перемикача SA2. Це напруження блокує лічильний вхід лічильника DD3 (СР; сигнали з датчика SF1 вже не зможуть змінити його стан) і відкриваючи електронний ключ, виконаний на транзисторах VT1, VT2, включає електродвигун M1. За 8…10 обертів його ротора вузол "вал редуктора-сережка тяги" виводиться з зачеплення і силова пружина, різко розпрямляючись, робить підсічку. Але вже в момент закінчення цього вузла (контактної пари SF2) на вході 12 елемента DD2.1 виникає "одиничне" напруга, що веде до появи "1" на вході R лічильника DD3. В результаті лічильник повертається у своє вихідне, "нульове" стан, на движку перемикача SA2 відновлюється "0" (напруга, близьке до потенціалу нульової шини), транзистори VT1, VT2 закриваються і електродвигун, зробивши лише потрібні обороти, відключається.
Перезарядження автомата виробляють при вимкненому тумблері SA1: його закороченная у цьому положенні контактна пара SA1.1 "тримає" електроніку автомата в передстартовому стані.
Запізнювання автомата, тобто час між появою сигналу 1 на движку перемикача SA2 і власне підсічкою, залежить від швидкохідності й потужності електродвигуна (він може бути сильно форсований), уповільнення редуктора, числа ниток валу, введених в сережку, змащування обертових частин і, звичайно, стану джерела живлення. У виготовленому екземплярі воно не перевищувало 0,2 с.
Чутливість датчика SF1 - 10 г/мм (зусилля - на волосіні, переміщення у контактної скоби). Вона залежить від м'якості пружин коромисла.
Джерелом живлення автомата, оснащеного 4-вольтним електродвигуном (від невстановленої іграшки), може бути батарея з чотирьох гальванічних елементів або акумуляторів, здатних при короткочасній розрядки (кілька десятих часток секунди) віддати струм 0,5…1 А. Для форсажу електродвигуна напруга живлення може бути і вищим. Але, звичайно, не вище максимально допустимого для мікросхем автомата.
Описаний електронний автомат тривалий час випробовувався на морській станції Інституту експериментальної біології моря Далекосхідного відділення РАН (акваторія островів Попова, Рейніке, Рікорда та ін). Лов вівся переважно донної риби на глибинах до 20…25 метрів. І хоча особливості морського лову - качка, зміщення човна під вітром, нерівності дна, інші перешкоди - ставили перед автоматом досить важкі завдання, він практично ні в чому не поступався і досвідченим рибалкам. А нерідко демонстрував свою перевагу… Автомат до того ж відрізнявся акуратною, практично ніколи не ушкоджує життєво важливі тканини підсічкою. Це виявилося приємною несподіванкою, так як риба ловилася і для пересадки в акваріум.
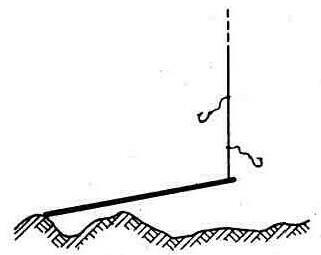
Рис. 4. Оснащення автомата
На малюнку показана звичайна оснащення автомата, близька до прийнятої в Примор'ї: основна волосінь 0,7… 1 мм, повідці - 0,5…0,6 мм довжиною 3…5 см, одинарні гачки №№10…12. Але грузило інше: сталевий стрижень діаметром 6…8 і довжиною 250 мм і більше. Таке грузило і таке його положення біля дна дозволяють зберегти натяг волосіні майже незмінним і при помітному хвилюванні. Але це - на додаток до електронних "роздумів" самого автомата. Ловля ж риби "в півводи" взагалі не представляла для нього проблеми. Про реальної чутливості автомата можна було судити по мінімальній вазі спійманих примірників - 50…100 р. Максимальний ж вага риби обмежувався лише міцністю повідків.
Публікація: www.cxem.net